2
EV with rooftop PV and V2G saves up to EUR 2410 yearly
Online Energy Management for Bidirectional EV Charging with Rooftop PV: An Aging-Aware MPC Approach
Aging-aware MPC optimizes bidirectional flows for arbitrage and self-consumption, beating unidirectional charging with only 1.27 percent额外电池
 full image
full image
abstract click to expand
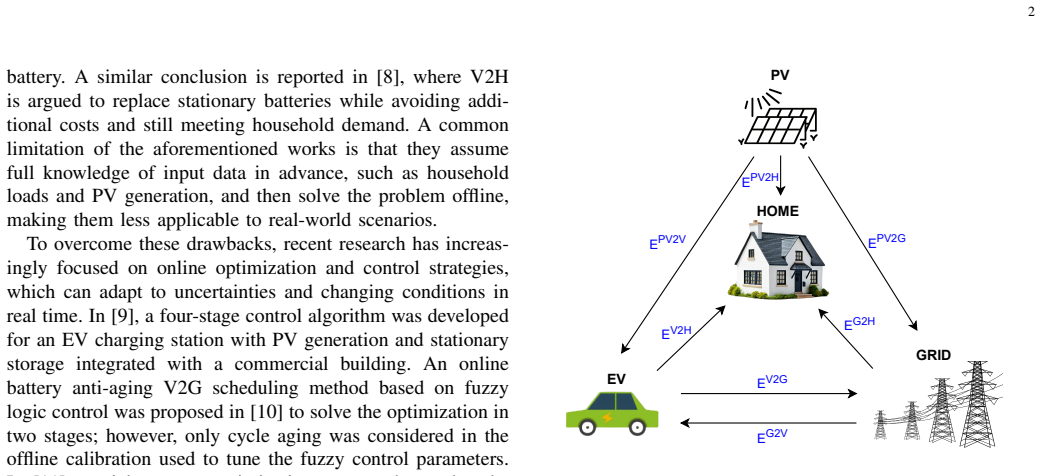
This paper investigates the economic impact of vehicle-home-grid integration in the presence of rooftop PV, by proposing an online, aging-aware energy management strategy for an electric vehicle (EV), a household, and the electrical grid. The model predictive control-based framework explicitly exploits vehicle-to-grid (V2G) and vehicle-to-home (V2H) operation to perform energy arbitrage, increase self-consumption, while respecting user-driven driving requirements. The framework optimizes power flows over a shrinking horizon using a detailed battery aging model that captures both calendar and cycle degradation, and a Transformer-based forecaster that provides short-term predictions of household load and solar irradiance. For a one-year horizon, the proposed strategy yields the lowest annual cost among all evaluated strategies. Adding PV increases the annual profit by EUR 1060.7 compared to operating without PV, and yields an economic gain of up to EUR 2410.5 over smart unidirectional charging, at the expense of only 1.27% extra battery degradation. Even in the least favorable case with no remuneration for V2G energy, bidirectional operation still delivers an economic gain of EUR 355.8 through V2H. Sensitivity analyses over V2G price ratio, EV battery size, household demand, and pickup time uncertainty confirm that these benefits persist across a wide range of scenarios and highlight the potential of EVs as active energy nodes, enabling sustainable energy management and cost-effective battery usage in real-world conditions.