Nonholonomic Source Seeking by Torque Tuning: Local and Semi-Global Feedbacks
Pith reviewed 2026-07-03 07:21 UTC · model grok-4.3
The pith
Two torque feedback laws steer a nonholonomic vehicle into source-centered circular motion using only scalar sensor readings and no position or gradient data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The torque law that superposes a fast oscillatory component with a slowly tuned bias steers the vehicle to a source-centered circular orbit; the output-feedback version yields local practical stability while the velocity-assisted version yields a globally asymptotically stable averaged system and therefore semi-global practical stability of the closed-loop vehicle.
What carries the argument
The composite torque input formed by a fast oscillatory term (producing averaged steering via symmetric-product approximation) plus a slowly tuned bias term (selecting the orbit radius and center).
If this is right
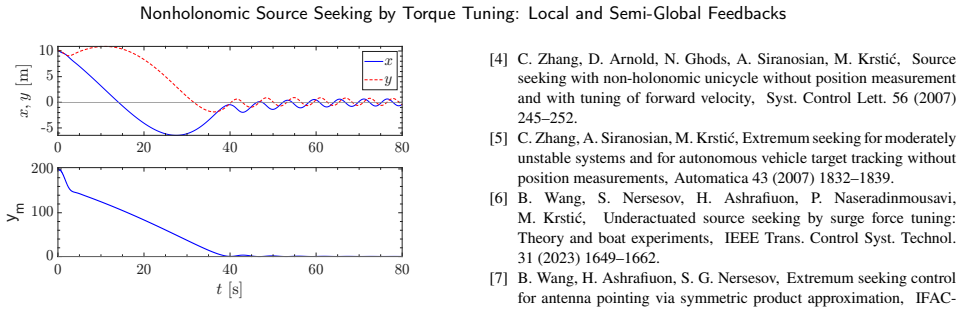
- The vehicle converges to a source-centered circular trajectory whose radius is set by the bias.
- Only scalar sensor output is required for the first design; forward speed and yaw rate are additionally used in the second.
- Unknown vehicle inertia and damping are accommodated without explicit identification.
- Position, heading, and source-value measurements are never needed.
Where Pith is reading between the lines
- The same oscillatory-plus-bias structure might be tested on vehicles whose forward speed is allowed to vary slowly.
- The averaging argument could be checked against higher-order Lie-bracket expansions when the oscillation frequency is only moderately large.
- The semi-global result suggests that an initial heading far from the source can still be recovered by the velocity-assisted law, a regime the local design does not guarantee.
Load-bearing premise
The fast oscillatory torque produces the desired averaged steering motion through the symmetric-product approximation and the vehicle holds constant forward speed while the source signal is scalar and the sensor sits at a fixed lateral offset.
What would settle it
A numerical simulation or physical test in which the vehicle, under the stated torque law and constant speed, fails to approach a circular orbit whose center coincides with the source location.
Figures





read the original abstract
This paper studies source seeking for a torque-controlled nonholonomic vehicle with a laterally displaced scalar sensor. The vehicle has constant forward speed, while its yaw motion is controlled by torque input with unknown inertia and damping. The objective is to steer the vehicle to a source-centered circular motion so that the lateral sensor approaches the unknown source, without using position, heading, source-location, gradient, or source-value information. The proposed torque law combines a fast oscillatory component, which generates averaged steering through symmetric-product approximation, with a slowly tuned bias component, which selects the desired orbit. Two bias-tuning designs are developed. The first is an output-feedback design using only the scalar measurement; it applies a Lie-bracket extremum-seeking update and yields local practical stability. The second is a velocity-assisted design using forward-speed and yaw-rate measurements; it tunes the bias through the yaw-rate tracking error and yields a globally asymptotically stable averaged system, implying semi-global practical stability of the original system. Simulations illustrate the proposed designs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies source seeking for a torque-controlled nonholonomic vehicle with constant forward speed and a laterally displaced scalar sensor. With unknown yaw inertia and damping, two torque laws are proposed that combine a fast oscillatory component (generating averaged steering via symmetric-product approximation) with a slowly tuned bias. The first uses Lie-bracket extremum-seeking on the scalar output for local practical stability; the second uses yaw-rate tracking error for bias tuning, producing a globally asymptotically stable averaged system and thus semi-global practical stability of the original dynamics. Simulations are provided to illustrate both designs.
Significance. If the averaging-based stability claims hold with the stated robustness, the work extends extremum-seeking and Lie-bracket techniques to torque-actuated nonholonomic vehicles under parametric uncertainty in the yaw dynamics, without requiring position, heading, or gradient measurements. The velocity-assisted design's semi-global practical stability result would be a useful addition to the literature on underactuated source seeking.
major comments (2)
- [Abstract, §4] Abstract and the averaged-system analysis (likely §4): the semi-global practical stability claim for the velocity-assisted design rests on the averaged system being globally asymptotically stable under the symmetric-product approximation. However, with unknown inertia J and damping b, the time-scale separation required for this approximation to hold uniformly depends on the (unspecified) oscillation frequency relative to the yaw time-constant J/b; no explicit lower bound on frequency or robustness margin is provided, which is load-bearing for the semi-global claim.
- [§3] The construction of the torque law (likely §3): the fast oscillatory component is asserted to generate the desired averaged yaw-rate input via symmetric-product approximation, but the error bounds between the original and averaged closed-loop systems are not quantified in terms of the unknown J and b, leaving the practical stability margins dependent on post-hoc parameter choices.
minor comments (2)
- [§2] Notation for the sensor displacement and source signal should be introduced with a diagram in §2 to clarify the lateral offset geometry.
- [Simulations] The simulation section would benefit from explicit reporting of the chosen oscillation frequency relative to the plant time constants used in each run.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on the averaging analysis. We address each major comment below. Revisions will be made to clarify the time-scale separation and error bounds under parametric uncertainty.
read point-by-point responses
-
Referee: [Abstract, §4] Abstract and the averaged-system analysis (likely §4): the semi-global practical stability claim for the velocity-assisted design rests on the averaged system being globally asymptotically stable under the symmetric-product approximation. However, with unknown inertia J and damping b, the time-scale separation required for this approximation to hold uniformly depends on the (unspecified) oscillation frequency relative to the yaw time-constant J/b; no explicit lower bound on frequency or robustness margin is provided, which is load-bearing for the semi-global claim.
Authors: The referee correctly notes that the symmetric-product (averaging) approximation requires sufficient time-scale separation between the fast oscillation frequency and the yaw dynamics time constant J/b. The semi-global practical stability result is stated for fixed but unknown J and b: for any compact set of initial conditions there exists a sufficiently high frequency such that the approximation holds with small error. We agree that an explicit lower bound on frequency (uniform in J, b) is not provided and cannot be without additional a priori bounds on J/b. In the revision we will add a remark in §4 explaining the dependence on the yaw time constant and noting that the frequency is a design parameter that can be increased until the observed yaw response exhibits the desired averaged behavior. This addresses the concern without altering the stated claims. revision: partial
-
Referee: [§3] The construction of the torque law (likely §3): the fast oscillatory component is asserted to generate the desired averaged yaw-rate input via symmetric-product approximation, but the error bounds between the original and averaged closed-loop systems are not quantified in terms of the unknown J and b, leaving the practical stability margins dependent on post-hoc parameter choices.
Authors: The error bounds follow from standard averaging theorems applied to the closed-loop yaw dynamics (which are linear in torque but with unknown J, b). These bounds depend on the Lipschitz constants of the vector fields and on the frequency; because J and b are unknown the explicit constants cannot be computed a priori. We will revise §3 and §4 to cite the precise averaging result used and to state explicitly that the practical stability margins are guaranteed only after the frequency is chosen large enough relative to the (unknown) yaw time constant, with the semi-global character referring to the set of initial conditions rather than to uniformity over all possible J, b. This clarification will be added without requiring new proofs. revision: yes
Circularity Check
No circularity detected; derivation relies on external standard techniques
full rationale
The paper invokes symmetric-product approximation for torque-induced averaged steering and Lie-bracket extremum-seeking for bias tuning, both drawn from established prior literature rather than defined or fitted within this work. The local practical stability and semi-global practical stability claims follow from standard averaging analysis on the resulting closed-loop system, with no evidence that any prediction or stability result reduces by construction to the paper's own inputs, fitted parameters, or self-citations. The velocity-assisted design uses yaw-rate tracking error to tune bias, yielding a GAS averaged system as an independent analysis step. No self-definitional loops, fitted-input predictions, or load-bearing self-citation chains appear in the described derivation chain. The result is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- oscillation frequency and amplitude
axioms (2)
- domain assumption Symmetric-product approximation generates averaged steering from fast oscillatory torque
- standard math Lie-bracket extremum-seeking produces local practical stability from scalar measurements
Reference graph
Works this paper leans on
-
[1]
Krstić, H.-H
M. Krstić, H.-H. Wang, Stability of extremum seeking feedback for general nonlinear dynamic systems, Automatica 36 (2000) 595–601
2000
-
[2]
K.B.Ariyur,M.Krstić,Real-timeoptimizationbyextremum-seeking control, John Wiley & Sons, Hoboken, NJ, 2003
2003
-
[3]
A.Scheinker, 100years ofextremumseeking: Asurvey, Automatica 161 (2024) 111481
2024
-
[4]
Zhang, D
C. Zhang, D. Arnold, N. Ghods, A. Siranosian, M. Krstić, Source seeking with non-holonomic unicycle without position measurement and with tuning of forward velocity, Syst. Control Lett. 56 (2007) 245–252
2007
-
[5]
C.Zhang,A.Siranosian,M.Krstić,Extremumseekingformoderately unstable systems and for autonomous vehicle target tracking without position measurements, Automatica 43 (2007) 1832–1839
2007
-
[6]
B. Wang, S. Nersesov, H. Ashrafiuon, P. Naseradinmousavi, M. Krstić, Underactuated source seeking by surge force tuning: Theory and boat experiments, IEEE Trans. Control Syst. Technol. 31 (2023) 1649–1662
2023
-
[7]
B. Wang, H. Ashrafiuon, S. G. Nersesov, Extremum seeking control for antenna pointing via symmetric product approximation, IFAC- PapersOnLine 59 (2025) 869–874
2025
-
[8]
A.Williams,A.Scheinker,E.-C.Huang,C.Taylor,M.Krstic, Exper- imentalsafeextremumseekingforaccelerators, IEEETrans.Control Syst. Technol. 32 (2024) 1881–1890
2024
-
[9]
Frihauf, S.-J
P. Frihauf, S.-J. Liu, M. Krstic, A single forward-velocity control signal for stochastic source seeking with multiple nonholonomic vehicles, ASME J. Dyn. Syst. Meas. Contr. 136 (2014) 051024
2014
-
[10]
Todorovski, M
V. Todorovski, M. Krstić, Newton nonholonomic source seeking for distance-dependentmaps, IEEETrans.Autom.Contr.70(2024)510– 517
2024
-
[11]
Cochran, M
J. Cochran, M. Krstić, Nonholonomic source seeking with tuning of angular velocity, IEEE Trans. Autom. Contr. 54 (2009) 717–731
2009
-
[12]
Raisch, M
A. Raisch, M. Krstić, Overshoot-free steering-based source seeking, IEEE Trans. Control Syst. Technol. 25 (2017) 818–827
2017
-
[14]
Ghods, M
N. Ghods, M. Krstić, Speed regulation in steering-based source seeking, Automatica 46 (2010) 452–459
2010
-
[15]
J. Lin, S. Song, K. You, C. Wu, 3-d velocity regulation for nonholo- nomic source seeking without position measurement, IEEE Trans. Control Syst. Technol. 24 (2015) 711–718
2015
-
[16]
Bullo, Averaging and vibrational control of mechanical systems, SIAM J
F. Bullo, Averaging and vibrational control of mechanical systems, SIAM J. Control Optim. 41 (2002) 542–562
2002
-
[17]
Suttner, Extremum-seeking control for a class of mechanical systems, IEEE Trans
R. Suttner, Extremum-seeking control for a class of mechanical systems, IEEE Trans. Autom. Contr. 68 (2022) 1200–1207
2022
-
[18]
Suttner, M
R. Suttner, M. Krstić, Extremum seeking control for fully actuated mechanical systems on Lie groups in the absence of dissipation, Automatica 152 (2023) 110945
2023
-
[19]
Suttner, Extremum seeking control for an acceleration controlled unicycle, IFAC-PapersOnLine 52 (2019) 676–681
R. Suttner, Extremum seeking control for an acceleration controlled unicycle, IFAC-PapersOnLine 52 (2019) 676–681
2019
-
[20]
Suttner, M
R. Suttner, M. Krstić, Acceleration-actuated source seeking without position and velocity sensing, IFAC-PapersOnLine 53 (2020) 5348– 5355
2020
-
[21]
Suttner, M
R. Suttner, M. Krstić, Source seeking with a torque-controlled unicycle, IEEE Contr. Syst. Lett. 7 (2022) 79–84
2022
-
[22]
Suttner, M
R. Suttner, M. Krstić, Nonholonomic source seeking in three dimen- sionsusingpitchandyawtorqueinputs,Syst.ControlLett.178(2023) 105584
2023
-
[23]
R.Suttner,M.Krstić, Nonlocalnonholonomicsourceseekingdespite local extrema, IEEE Trans. Autom. Contr. 69 (2023) 2575–2582
2023
-
[24]
Suttner, M
R. Suttner, M. Krstić, Overcoming local extrema in torque-actuated source seeking using the divergence theorem and delay, Automatica 167 (2024) 111799
2024
-
[25]
Moreau, D
L. Moreau, D. Aeyels, Practical stability and stabilization, IEEE Trans. Autom. Contr. 45 (2000) 1554–1558
2000
-
[26]
H.-B. Dürr, M. S. Stanković, C. Ebenbauer, K. H. Johansson, Lie bracket approximation of extremum seeking systems, Automatica 49 (2013) 1538–1552
2013
-
[27]
H.-B. Dürr, M. Krstić, A. Scheinker, C. Ebenbauer, Extremum seek- ing for dynamic maps using Lie brackets and singular perturbations, Automatica 83 (2017) 91–99
2017
-
[28]
H. K. Khalil, Nonlinear Systems, Prentice-Hall, Upper Saddle River, NJ, 3rd edition, 2002. Preprint submitted to Elsevier Page 8 of 8
2002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.