Distributed Containment of a Compromised Agent through Repulsive Cages
Pith reviewed 2026-07-02 07:04 UTC · model grok-4.3
The pith
Defenders can contain a compromised agent by configuring positions that turn its collision-avoidance responses into a repulsive cage.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that robust one-step containment admits an exact geometric characterization via support functions and normal cones applied to the avoidance response. This characterization introduces the repulsive cage, a defender configuration that forces the compromised agent's next state to remain inside the admissible region for every possible adversarial command. The cage construction supplies a centralized Stackelberg oracle and directly motivates a fully distributed online algorithm whose dynamic regret grows sublinearly with the number of stages, with explicit dependence on network estimation error and stage-wise variability.
What carries the argument
The repulsive cage: a geometric defender configuration whose induced normal cone to the avoidance response set guarantees that the target's updated position lies inside the admissible region no matter which command the adversary selects.
If this is right
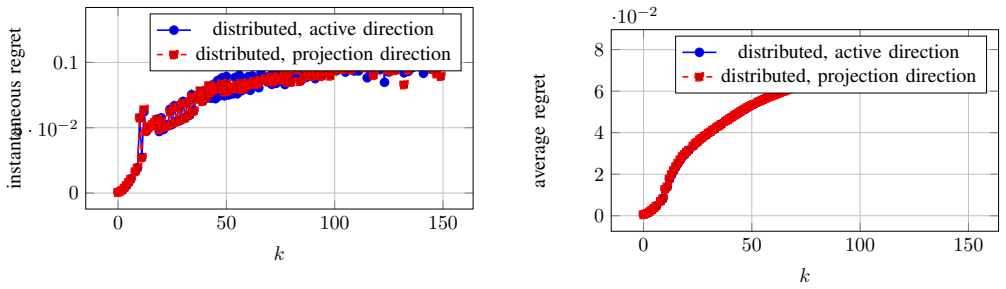
- The distributed algorithm achieves sublinear dynamic regret relative to the centralized Stackelberg oracle.
- Network-induced estimation errors and temporal variability of the stage optimum enter the regret bound additively.
- The same geometric conditions support both pure containment and active steering of the target toward a destination.
- Simulations confirm that the distributed implementation tracks the centralized benchmark in practice.
Where Pith is reading between the lines
- The same avoidance-layer assumption could allow the method to apply to ground vehicles or other platforms that separate safety layers from mission control.
- The regret decomposition suggests that improving local field estimation would directly tighten performance in larger networks.
- Physical experiments could check how sensor noise or actuator limits alter the exact geometric containment conditions derived from support functions.
Load-bearing premise
Low-level collision-avoidance modules remain active and responsive even when an agent's high-level commands are under adversarial control.
What would settle it
A direct test would be to disable or override the avoidance module on the compromised agent and check whether the defenders can still enforce containment.
Figures



read the original abstract
UAV swarms and cyber-physical multi-agent systems are increasingly deployed in safety-critical missions that require coordinated motion, distributed decision making, and autonomy. A major security risk arises when a legitimate agent is hijacked and driven by adversarial high-level commands. Rather than focusing on detection and isolation of malicious agents, we exploit a structural property common in autonomous platforms: low-level collision-avoidance modules are typically implemented as independent safety layers and may remain active even under high-level compromise. Building on this property, we propose a distributed containment framework that uses the compromised agent's uncompromised avoidance response as an indirect actuation channel. Defender agents select their geometric configuration to shape the repulsive field experienced by the target, with the goal of keeping it inside a prescribed admissible region and, when required, steering it toward a desired destination. The interaction is modeled as an online Stackelberg game in which defenders act as leaders and the adversary reacts by choosing the target command. Using support-function and normal-cone arguments, we derive an exact geometric characterization of robust one-step containment and introduce the notion of a repulsive cage. These results define a centralized Stackelberg oracle and motivate a fully distributed online approximation based on local communication and dynamic field estimation. We prove sublinear dynamic-regret bounds with respect to the centralized benchmark, quantifying the effect of network-induced estimation errors and temporal variability of the stage-wise optimum. Simulations validate the approach and corroborate the theory.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes exploiting uncompromised low-level collision-avoidance modules in a hijacked agent as an indirect actuation channel for containment. It models the defender-adversary interaction as an online Stackelberg game, derives an exact geometric characterization of robust one-step containment via support-function and normal-cone arguments, introduces the repulsive-cage concept, defines a centralized oracle, and develops a fully distributed online approximation whose dynamic regret is provably sublinear with respect to the oracle benchmark; simulations are used for validation.
Significance. If the derivations hold, the work offers a distinctive security approach for cyber-physical multi-agent systems that leverages platform structure instead of detection or isolation. Credit is due for the convex-analytic characterization of containment, the introduction of repulsive cages as a modeling primitive, and the sublinear dynamic-regret analysis that quantifies network-induced estimation errors; these elements supply both theoretical guarantees and a practical distributed implementation path.
minor comments (2)
- The abstract states that simulations corroborate the theory, yet no quantitative metrics (e.g., regret curves, containment success rates, or parameter values) are visible; adding a brief table or figure reference in the main text would strengthen reproducibility.
- Notation for the normal-cone and support-function arguments could be introduced with a short preliminary subsection to aid readers unfamiliar with the precise geometric constructions used for the one-step containment condition.
Simulated Author's Rebuttal
We thank the referee for the positive summary, recognition of the convex-analytic contributions, and recommendation of minor revision. No specific major comments appear in the report.
Circularity Check
No significant circularity
full rationale
The paper's core steps rely on external convex-analytic primitives (support functions, normal cones) applied to a modeling premise about independent low-level avoidance layers; these are not defined in terms of the containment or regret results. The centralized oracle and distributed approximation are motivated by the geometric characterization rather than presupposing it, and the sublinear dynamic-regret bounds are derived with respect to an independent benchmark. No self-definitional equations, fitted inputs renamed as predictions, or load-bearing self-citations appear in the abstract or described derivation chain.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption low-level collision-avoidance modules remain active even under high-level compromise
invented entities (1)
-
repulsive cage
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Consensus and coop- eration in networked multi-agent systems,
R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and coop- eration in networked multi-agent systems,”Proceedings of the IEEE, vol. 95, no. 1, pp. 215–233, 2007. 0 50 100 150 0 2 4 6 8 ·10−2 k average regret distributed, active direction distributed, projection direction Figure 4. Average dynamic regret. A decreasing trend indicates that cumu- lati...
2007
-
[2]
Coverage control for mobile sensing networks,
J. Cortés, S. Martínez, T. Karatas, and F. Bullo, “Coverage control for mobile sensing networks,”IEEE Transactions on Robotics and Automation, vol. 20, no. 2, pp. 243–255, 2004
2004
-
[3]
Real-time obstacle avoidance for manipulators and mobile robots,
O. Khatib, “Real-time obstacle avoidance for manipulators and mobile robots,”The International Journal of Robotics Research, vol. 5, no. 1, pp. 90–98, 1986
1986
-
[4]
Exact robot navigation using artificial potential functions,
E. Rimon and D. E. Koditschek, “Exact robot navigation using artificial potential functions,”IEEE Transactions on Robotics and Automation, vol. 8, no. 5, pp. 501–518, 1992
1992
-
[5]
von Stackelberg,Market Structure and Equilibrium
H. von Stackelberg,Market Structure and Equilibrium. Berlin, Heidel- berg: Springer, 2011
2011
-
[6]
Tambe,Security and Game Theory: Algorithms, Deployed Systems, Lessons Learned
M. Tambe,Security and Game Theory: Algorithms, Deployed Systems, Lessons Learned. Cambridge, U.K.: Cambridge University Press, 2011
2011
-
[7]
Playing games for security: An efficient exact algorithm for solving Bayesian Stackelberg games,
P. Paruchuri, J. P. Pearce, J. Marecki, M. Tambe, F. Ordóñez, and S. Kraus, “Playing games for security: An efficient exact algorithm for solving Bayesian Stackelberg games,” inProceedings of the 7th International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2008, pp. 895–902
2008
-
[8]
Commit- ment without regrets: Online learning in Stackelberg security games,
M.-F. Balcan, A. Blum, N. Haghtalab, and A. D. Procaccia, “Commit- ment without regrets: Online learning in Stackelberg security games,” inProceedings of the 16th ACM Conference on Economics and Com- putation (EC), Portland, OR, USA, 2015, pp. 61–78
2015
-
[9]
Online convex programming and generalized infinitesi- mal gradient ascent,
M. Zinkevich, “Online convex programming and generalized infinitesi- mal gradient ascent,” inProceedings of the 20th International Confer- ence on Machine Learning (ICML), 2003, pp. 928–936
2003
-
[10]
Online learning and online convex optimization,
S. Shalev-Shwartz, “Online learning and online convex optimization,” Foundations and Trends in Machine Learning, vol. 4, no. 2, pp. 107– 194, 2012
2012
-
[11]
Distributed subgradient methods for multi- agent optimization,
A. Nedi ´c and A. Ozdaglar, “Distributed subgradient methods for multi- agent optimization,”IEEE Transactions on Automatic Control, vol. 54, no. 1, pp. 48–61, 2009
2009
-
[12]
X. Yi, X. Li, L. Xie, and K. H. Johansson, “Distributed online convex −5 −4 −3 −2 −1 0 1 2 3 4 5 −1 0 1 x y centralized oracle active direction projection direction Ωk center Figure 6. Target trajectories and moving admissible-set centers. The MATLAB video overlays the full admissible disks and defender positions. optimization with time-varying coupled in...
2020
-
[13]
Herding an adversarial swarm in an obstacle environment,
V . S. Chipade and D. Panagou, “Herding an adversarial swarm in an obstacle environment,” inProceedings of the 58th IEEE Conference on Decision and Control (CDC), Nice, France, 2019, pp. 3685–3690
2019
-
[14]
Multi-swarm herding: Protecting against adversarial swarms,
V . S. Chipade and D. Panagou, “Multi-swarm herding: Protecting against adversarial swarms,” inProceedings of the 59th IEEE Conference on Decision and Control (CDC), Jeju Island, Republic of Korea, 2020, pp. 816–823
2020
-
[15]
Aerial swarm defense by StringNet herding: Theory and experiments,
V . S. Chipade, V . S. A. Marella, and D. Panagou, “Aerial swarm defense by StringNet herding: Theory and experiments,”Frontiers in Robotics and AI, vol. 8, Art. no. 640446, 2021
2021
-
[16]
Controlling noncooperative herds with robotic herders,
A. Pierson and M. Schwager, “Controlling noncooperative herds with robotic herders,”IEEE Transactions on Robotics, vol. 34, no. 2, pp. 517–525, 2018
2018
-
[17]
Single-agent indirect herding of multiple targets with uncertain dynamics,
R. A. Licitra, Z. I. Bell, and W. E. Dixon, “Single-agent indirect herding of multiple targets with uncertain dynamics,”IEEE Transactions on Robotics, vol. 35, no. 4, pp. 847–860, 2019
2019
-
[18]
Herding stochastic autonomous agents via local control rules and online target selection strategies,
F. Auletta, D. Fiore, M. J. Richardson, and M. di Bernardo, “Herding stochastic autonomous agents via local control rules and online target selection strategies,”Autonomous Robots, vol. 46, no. 3, pp. 469–481, 2022
2022
-
[19]
Adaptive multirobot implicit control of heterogeneous herds,
E. Sebastián, E. Montijano, and C. Sagüés, “Adaptive multirobot implicit control of heterogeneous herds,”IEEE Transactions on Robotics, vol. 38, no. 6, pp. 3622–3635, 2022
2022
-
[20]
A distributed outmost push approach for multi-robot herding,
S. Zhang, X. Lei, M. Duan, X. Peng, and J. Pan, “A distributed outmost push approach for multi-robot herding,”IEEE Transactions on Robotics, vol. 40, pp. 1706–1723, 2024
2024
-
[21]
Shepherding and herdability in complex multiagent systems,
A. Lama and M. di Bernardo, “Shepherding and herdability in complex multiagent systems,”Physical Review Research, vol. 6, no. 3, Art. no. L032012, 2024
2024
-
[22]
Nonreciprocal field theory for decision-making in multi-agent control systems,
A. Lama, M. di Bernardo, and S. H. L. Klapp, “Nonreciprocal field theory for decision-making in multi-agent control systems,”Nature Communications, vol. 16, Art. no. 8450, 2025
2025
-
[23]
Confinement control of double integrators using partially periodic leader trajectories,
K. Elamvazhuthi, S. Wilson, and S. Berman, “Confinement control of double integrators using partially periodic leader trajectories,” in Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 2016, pp. 5537–5544
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.