Multi-Rate Nonlinear Model Predictive Control for Wall-Supported Bipedal Locomotion of Quadrupedal Robots
Pith reviewed 2026-07-03 12:45 UTC · model grok-4.3
The pith
Multi-rate NMPC plans both contact points and center-of-mass trajectories to enable wall-supported bipedal locomotion in quadrupeds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By embedding contact-point planning inside a multi-rate optimal-control problem that uses single-rigid-body dynamics, the framework generates dynamically feasible reference trajectories that a whole-body controller can track, thereby realizing wall-assisted bipedal locomotion on irregular terrain where heuristic strategies fail.
What carries the argument
Multi-rate nonlinear model predictive control (MR-NMPC) that simultaneously optimizes discrete-time contact-point sequences and continuous-time center-of-mass and orientation trajectories subject to unilateral contact and dynamics constraints.
If this is right
- Contact planning inside the optimizer removes the need for separate heuristic foot-placement rules.
- The layered structure separates fast contact decisions from slower CoM motion, allowing real-time solution of the high-level problem.
- Wall contact is treated as an additional unilateral constraint that the optimizer can activate or deactivate.
- The same architecture is shown to tolerate external pushes while maintaining bipedal support on rough ground.
Where Pith is reading between the lines
- The same multi-rate structure could be applied to other hybrid locomotion modes that switch between quadrupedal and bipedal gaits.
- Because the high-level model is deliberately reduced, the method may scale to longer planning horizons or to multi-robot coordination without increasing computational cost proportionally.
Load-bearing premise
The single-rigid-body model used at the high level produces reference trajectories that the low-level whole-body controller can track reliably despite unilateral contacts, underactuation, and external disturbances.
What would settle it
An experiment in which the robot loses balance or violates contact constraints while following the planned trajectories on the same irregular terrain used in the simulations would show that the single-rigid-body references are not trackable.
Figures




read the original abstract
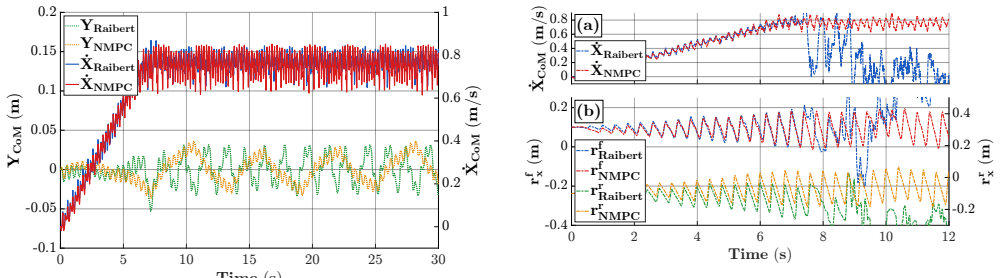
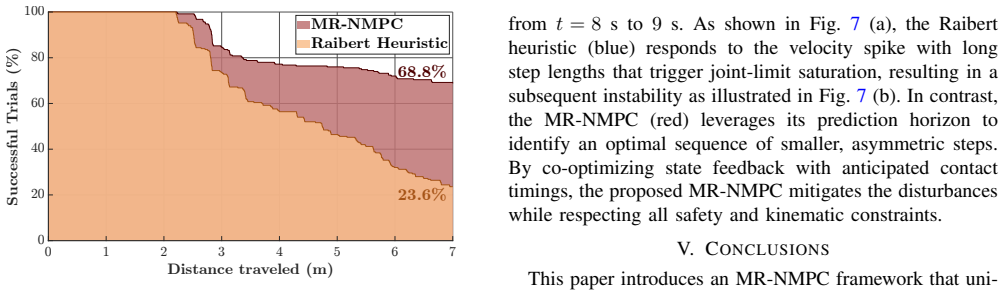
This paper presents a novel layered planning and control framework based on multi-rate nonlinear model predictive control (MR-NMPC) that enables quadrupedal robots to perform hybrid bipedal locomotion with wall-assisted support in constrained environments. Real-time trajectory optimization for this locomotion presents significant challenges, as the controller must simultaneously plan for both the contact points and the continuous trajectories of the robot's center of mass (CoM) and orientation within the robot's nonlinear dynamics while accounting for unilateral contact constraints, underactuation, and the switching nature of the robot's dynamics. At the high level of the control framework, an MR-NMPC is proposed, which dynamically plans both the discrete-time trajectories of the contact points and the continuous-time trajectories of the CoM and orientation, using a single rigid body (SRB) dynamics model. By incorporating contact-point planning within the multi-rate optimal control framework, this approach enhances dynamic stability compared to heuristic foot placement strategies. At the low level of the control framework, a nonlinear whole-body controller (WBC) based on virtual constraints and a quadratic program enforces full-order dynamics and tracks the MR-NMPC references. The proposed approach is validated through extensive numerical simulations demonstrating the robust wall-assisted bipedal locomotion of a Unitree A1 quadrupedal robot on rough terrains and under external disturbances in a constrained environment. Comparative analysis shows that the proposed MR-NMPC achieves a 2.9 times higher success rate compared to conventional MPC with heuristic-based foot placement strategies in negotiating irregular terrain at high speeds.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a layered control framework for wall-supported bipedal locomotion of quadrupedal robots. A high-level multi-rate nonlinear MPC (MR-NMPC) using a single-rigid-body (SRB) dynamics model plans discrete contact-point trajectories together with continuous CoM and orientation trajectories; a low-level whole-body controller (WBC) based on virtual constraints and a quadratic program enforces full-order dynamics and tracks the references. The central empirical claim is that this MR-NMPC achieves a 2.9 times higher success rate than conventional MPC with heuristic foot placement when negotiating irregular terrain at high speeds, as demonstrated in numerical simulations of a Unitree A1 robot under external disturbances.
Significance. If the comparative performance result is shown to be robust to the modeling gap between the SRB planner and the full-order WBC under active wall contacts, the work would supply a concrete, real-time-capable method for hybrid locomotion in constrained spaces. The explicit incorporation of contact-point planning inside the multi-rate optimal-control loop is a clear technical contribution relative to heuristic baselines.
major comments (1)
- [Abstract] Abstract: the 2.9× success-rate claim rests on MR-NMPC references generated with an SRB model being reliably tracked by the WBC under unilateral wall contacts and irregular terrain. The SRB model abstracts the robot to a single rigid body with point feet and does not embed the kinematic chain or distributed reaction forces from wall contacts; if these omissions produce dynamically inconsistent CoM/orientation trajectories when wall support is active, the WBC cannot track them and the performance margin over the heuristic baseline disappears. This modeling assumption is load-bearing for the central comparative result.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and detailed comments. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the 2.9× success-rate claim rests on MR-NMPC references generated with an SRB model being reliably tracked by the WBC under unilateral wall contacts and irregular terrain. The SRB model abstracts the robot to a single rigid body with point feet and does not embed the kinematic chain or distributed reaction forces from wall contacts; if these omissions produce dynamically inconsistent CoM/orientation trajectories when wall support is active, the WBC cannot track them and the performance margin over the heuristic baseline disappears. This modeling assumption is load-bearing for the central comparative result.
Authors: The SRB model is a standard reduced-order approximation employed to achieve real-time contact planning. The low-level WBC is formulated on the full-order dynamics and explicitly enforces the unilateral wall-contact constraints, full kinematic chain, and distributed reaction forces during execution. All reported success rates, including the 2.9× improvement, are obtained from closed-loop simulations that use the identical full-order Unitree A1 model for both the proposed MR-NMPC and the heuristic baseline; therefore the comparison already incorporates any tracking discrepancies that arise from the SRB approximation. We will add a dedicated paragraph in the revised manuscript that quantifies WBC tracking errors under active wall contact and discusses the conditions under which the SRB reference remains feasible for the full-order system. revision: partial
Circularity Check
No circularity; performance claims are empirical simulation outcomes
full rationale
The paper proposes an MR-NMPC framework using SRB dynamics at the high level for contact-point and CoM planning, tracked by a full-order WBC at the low level. The central comparative claim (2.9× success rate) is presented as the result of numerical simulations on irregular terrain, not as a first-principles derivation or fitted quantity that reduces to its own inputs. No self-definitional loops, fitted inputs renamed as predictions, or load-bearing self-citations appear in the derivation chain. The model separation (SRB vs. full-order) is explicitly stated and does not create a tautology. This is a standard empirical validation of a control architecture.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Optimization-based control for dynamic legged robots,
P. M. Wensing, M. Posa, Y . Hu, A. Escande, N. Mansard, and A. D. Prete, “Optimization-based control for dynamic legged robots,”IEEE Transactions on Robotics, vol. 40, pp. 43–63, 2024
2024
-
[2]
Templates and anchors: Neuromechanical hypotheses of legged locomotion on land,
R. Full and D. Koditschek, “Templates and anchors: Neuromechanical hypotheses of legged locomotion on land,”Journal of Experimental Biology, vol. 202, no. 23, pp. 3325–3332, 1999
1999
-
[3]
Study of dynamic biped locomotion on rugged terrain-derivation and application of the linear inverted pendulum mode,
S. Kajita and K. Tani, “Study of dynamic biped locomotion on rugged terrain-derivation and application of the linear inverted pendulum mode,” inIEEE International Conference on Robotics and Automation, 1991, pp. 1405–1406
1991
-
[4]
Terrain- adaptive, ALIP-based bipedal locomotion controller via model pre- dictive control and virtual constraints,
G. Gibson, O. Dosunmu-Ogunbi, Y . Gong, and J. Grizzle, “Terrain- adaptive, ALIP-based bipedal locomotion controller via model pre- dictive control and virtual constraints,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 6724– 6731
2022
-
[5]
Compliant leg behavior explains basic dynamics of walking and running,
H. Geyer, A. Seyfarth, and R. Blickhan, “Compliant leg behavior explains basic dynamics of walking and running,”Proceedings. Bi- ological sciences / The Royal Society, vol. 273, pp. 2861–7, 08 2006
2006
-
[6]
Balance control using center of mass height variation: Limitations imposed by unilateral contact,
T. Koolen, M. Posa, and R. Tedrake, “Balance control using center of mass height variation: Limitations imposed by unilateral contact,” inIEEE-RAS International Conference on Humanoid Robots (Hu- manoids), 2016, pp. 8–15
2016
-
[7]
Autonomous navigation of underactuated bipedal robots in height-constrained environments,
Z. Li, J. Zeng, S. Chen, and K. Sreenath, “Autonomous navigation of underactuated bipedal robots in height-constrained environments,” The International Journal of Robotics Research, vol. 42, no. 8, pp. 565–585, 2023
2023
-
[8]
3-D underactuated bipedal walking via H-LIP based gait synthesis and stepping stabilization,
X. Xiong and A. Ames, “3-D underactuated bipedal walking via H-LIP based gait synthesis and stepping stabilization,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2405–2425, 2022
2022
-
[9]
Centroidal dynamics of a humanoid robot,
D. E. Orin, A. Goswami, and S.-H. Lee, “Centroidal dynamics of a humanoid robot,”Autonomous robots, vol. 35, no. 2, pp. 161–176, 2013
2013
-
[10]
Dynamic locomotion in the MIT Cheetah 3 through convex model-predictive control,
J. Di Carlo, P. M. Wensing, B. Katz, G. Bledt, and S. Kim, “Dynamic locomotion in the MIT Cheetah 3 through convex model-predictive control,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2018, pp. 1–9
2018
-
[11]
Variational-based optimal control of underactuated balancing for dynamic quadrupeds,
M. Chignoli and P. M. Wensing, “Variational-based optimal control of underactuated balancing for dynamic quadrupeds,”IEEE Access, vol. 8, pp. 49 785–49 797, 2020
2020
-
[12]
Representation-free model predictive control for dynamic motions in quadrupeds,
Y . Ding, A. Pandala, C. Li, Y .-H. Shin, and H.-W. Park, “Representation-free model predictive control for dynamic motions in quadrupeds,”IEEE Transactions on Robotics, vol. 37, no. 4, pp. 1154–1171, 2021
2021
-
[13]
Robust predictive control for quadrupedal locomotion: Learning to close the gap between reduced-and full-order models,
A. Pandala, R. T. Fawcett, U. Rosolia, A. D. Ames, and K. Ak- bari Hamed, “Robust predictive control for quadrupedal locomotion: Learning to close the gap between reduced-and full-order models,” IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 6622–6629, 2022
2022
-
[14]
Predictive control with indirect adaptive laws for payload transportation by quadrupedal robots,
L. Amanzadeh, T. Chunawala, R. T. Fawcett, A. Leonessa, and K. Akbari Hamed, “Predictive control with indirect adaptive laws for payload transportation by quadrupedal robots,”IEEE Robotics and Automation Letters, vol. 9, no. 11, pp. 10 359–10 366, 2024
2024
-
[15]
Real-time constrained nonlinear model predictive control on SO(3) for dynamic legged locomotion,
S. Hong, J.-H. Kim, and H.-W. Park, “Real-time constrained nonlinear model predictive control on SO(3) for dynamic legged locomotion,” in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 3982–3989
2020
-
[16]
A unified MPC framework for whole-body dynamic locomotion and manipula- tion,
J.-P. Sleiman, F. Farshidian, M. V . Minniti, and M. Hutter, “A unified MPC framework for whole-body dynamic locomotion and manipula- tion,”IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4688– 4695, 2021
2021
-
[17]
Multi- layered safety for legged robots via control barrier functions and model predictive control,
R. Grandia, A. J. Taylor, A. D. Ames, and M. Hutter, “Multi- layered safety for legged robots via control barrier functions and model predictive control,” in2021 IEEE International Conference on Robotics and Automation, 2021, pp. 8352–8358
2021
-
[18]
Walking in narrow spaces: Safety-critical locomotion control for quadrupedal robots with duality-based optimization,
Q. Liao, Z. Li, A. Thirugnanam, J. Zeng, and K. Sreenath, “Walking in narrow spaces: Safety-critical locomotion control for quadrupedal robots with duality-based optimization,” in2023 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), 2023, pp. 2723–2730
2023
-
[19]
Perceptive locomotion through nonlinear model-predictive control,
R. Grandia, F. Jenelten, S. Yang, F. Farshidian, and M. Hutter, “Perceptive locomotion through nonlinear model-predictive control,” IEEE Transactions on Robotics, vol. 39, no. 5, pp. 3402–3421, 2023
2023
-
[20]
A Distributed Layered Planning and Control Algorithm for Teams of Quadrupedal Robots: An Obstacle-Aware Nonlinear MPC Approach,
B. M. Imran, R. T. Fawcett, J. Kim, A. Leonessa, and K. Ak- bari Hamed, “A Distributed Layered Planning and Control Algorithm for Teams of Quadrupedal Robots: An Obstacle-Aware Nonlinear MPC Approach,”Journal of Dynamic Systems, Measurement, and Control, vol. 147, no. 3, 2025
2025
-
[21]
Safety-critical and distributed nonlinear predictive con- trollers for teams of quadrupedal robots,
B. M. Imran, J. Kim, T. Chunawala, A. Leonessa, and K. Ak- bari Hamed, “Safety-critical and distributed nonlinear predictive con- trollers for teams of quadrupedal robots,”IEEE Robotics and Automa- tion Letters, vol. 10, no. 9, pp. 9176–9183, 2025
2025
-
[22]
Whole-body nonlinear model predictive control through contacts for quadrupeds,
M. Neunert, M. St ¨auble, M. Giftthaler, C. D. Bellicoso, J. Carius, C. Gehring, M. Hutter, and J. Buchli, “Whole-body nonlinear model predictive control through contacts for quadrupeds,”IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 1458–1465, 2018
2018
-
[23]
Crocoddyl: An efficient and versatile framework for multi-contact optimal control,
C. Mastalli, R. Budhiraja, W. Merkt, G. Saurel, B. Hammoud, M. Naveau, J. Carpentier, L. Righetti, S. Vijayakumar, and N. Mansard, “Crocoddyl: An efficient and versatile framework for multi-contact optimal control,” inIEEE International Conference on Robotics and Automation (ICRA), 2020
2020
-
[24]
BiConMP: A nonlinear model predictive control framework for whole body motion planning,
A. Meduri, P. Shah, J. Viereck, M. Khadiv, I. Havoutis, and L. Righetti, “BiConMP: A nonlinear model predictive control framework for whole body motion planning,”IEEE Transactions on Robotics, vol. 39, no. 2, pp. 905–922, 2023
2023
-
[25]
Multi-modal legged locomotion framework with automated residual reinforcement learning,
C. Yu and A. Rosendo, “Multi-modal legged locomotion framework with automated residual reinforcement learning,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 312–10 319, 2022
2022
-
[26]
Learning and adapting agile locomotion skills by transferring experience,
L. Smith, J. C. Kew, T. Li, L. Luu, X. B. Peng, S. Ha, J. Tan, and S. Levine, “Learning and adapting agile locomotion skills by transferring experience,” inProceedings of Robotics: Science and Systems (RSS), 2023
2023
-
[27]
Learning agile bipedal motions on a quadrupedal robot,
Y . Li, J. Li, W. Fu, and Y . Wu, “Learning agile bipedal motions on a quadrupedal robot,” inIEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 9735–9742
2024
-
[28]
Leveraging symmetry in RL-based legged locomotion control,
Z. Su, X. Huang, D. Ordo ˜nez-Apraez, Y . Li, Z. Li, Q. Liao, G. Turrisi, M. Pontil, C. Semini, Y . Wu, and K. Sreenath, “Leveraging symmetry in RL-based legged locomotion control,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 6899– 6906
2024
-
[29]
Learning bipedal walking on a quadruped robot via adver- sarial motion priors,
T. Peng, L. Bao, J. Humphreys, A. M. Delfaki, D. Kanoulas, and C. Zhou, “Learning bipedal walking on a quadruped robot via adver- sarial motion priors,” inTowards Autonomous Robotic Systems, M. N. Huda, M. Wang, and T. Kalganova, Eds. Springer Nature Switzerland, 2025
2025
-
[30]
A learning framework for diverse legged robot locomotion using barrier-based style rewards,
G. Kim, Y .-H. Lee, and H.-W. Park, “A learning framework for diverse legged robot locomotion using barrier-based style rewards,” inIEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 10 004–10 010
2025
-
[31]
KLEIYN : A quadruped robot with an active waist for both locomotion and wall climbing,
K. Yoneda, K. Kawaharazuka, T. Suzuki, T. Hattori, and K. Okada, “KLEIYN : A quadruped robot with an active waist for both locomotion and wall climbing,” 2025. [Online]. Available: https: //arxiv.org/abs/2507.06562
-
[32]
Accelerating model predictive control for legged robots through distributed optimization,
L. Amatucci, G. Turrisi, A. Bratta, V . Barasuol, and C. Semini, “Accelerating model predictive control for legged robots through distributed optimization,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 12 734–12 741
2024
-
[33]
Contact- implicit model predictive control: Controlling diverse quadruped mo- tions without pre-planned contact modes or trajectories,
G. Kim, D. Kang, J.-H. Kim, S. Hong, and H.-W. Park, “Contact- implicit model predictive control: Controlling diverse quadruped mo- tions without pre-planned contact modes or trajectories,”The Inter- national Journal of Robotics Research, vol. 44, no. 3, pp. 486–510, 2025
2025
-
[34]
Robust stabilization of periodic gaits for quadrupedal locomotion via QP- based virtual constraint controllers,
R. T. Fawcett, A. Pandala, A. D. Ames, and K. Akbari Hamed, “Robust stabilization of periodic gaits for quadrupedal locomotion via QP- based virtual constraint controllers,”IEEE Control Systems Letters, pp. 1736–1741, 2021
2021
-
[35]
Westervelt, J
E. Westervelt, J. Grizzle, C. Chevallereau, J. Choi, and B. Morris, Feedback Control of Dynamic Bipedal Robot Locomotion. Taylor & Francis/CRC, 2007
2007
-
[36]
Per-contact iteration method for solving contact dynamics,
J. Hwangbo, J. Lee, and M. Hutter, “Per-contact iteration method for solving contact dynamics,”IEEE Robotics and Automation Letters, vol. 3, no. 2, pp. 895–902, April 2018
2018
-
[37]
CasADi – A software framework for nonlinear optimization and optimal control,
J. A. E. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi – A software framework for nonlinear optimization and optimal control,”Mathematical Programming Computation, vol. 11, no. 1, pp. 1–36, 2019
2019
-
[38]
On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear program- ming,
A. W ¨achter and L. T. Biegler, “On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear program- ming,”Mathematical programming, vol. 106, pp. 25–57, 2006
2006
-
[39]
D. Kang, F. D. Vincenti, and S. Coros, “Nonlinear model predictive control for quadrupedal locomotion using second-order sensitivity analysis,” 2022. [Online]. Available: https://arxiv.org/abs/2207.10465
-
[40]
Robust footstep planning and lqr control for dynamic quadrupedal locomotion,
G. Xin, S. Xin, O. Cebe, M. J. Pollayil, F. Angelini, M. Garabini, S. Vijayakumar, and M. Mistry, “Robust footstep planning and lqr control for dynamic quadrupedal locomotion,”IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 4488–4495, 2021
2021
-
[41]
Legged robots,
M. H. Raibert, “Legged robots,”Communications of the ACM, vol. 29, no. 6, p. 499–514, 1986
1986
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.