Elasto-Hydrodynamic Propulsion of a Magnetically Actuated Filament
Pith reviewed 2026-07-03 18:06 UTC · model grok-4.3
The pith
The swimming speed of a magnetically actuated elastic filament peaks when its length is comparable to the elasto-hydrodynamic length.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The swimming dynamics are governed by the EH length and a magneto-viscous-elastic stroke amplitude. The swimming speed is non-monotonic with increasing ratio of the swimmer length to the EH length, and reaches a maximum when the swimmer length is on the order of the EH length. Viscous boundary contributions are crucial for quantitative agreement with experiment, while the analytical limit of free tail boundary conditions applies when those contributions can be neglected.
What carries the argument
The elasto-hydrodynamic length, the scale at which elastic bending resistance balances viscous drag under magnetic actuation, together with the self-consistent filament shapes obtained from Euler-Bernoulli beam theory and resistive force theory.
If this is right
- Net forward motion is obtained without any prescribed kinematics, emerging only from actuation and the boundary conditions.
- Speed falls when the filament is either much shorter or much longer than the EH length.
- The free-tail analytical limit can be used once viscous boundary torques become negligible.
- Omitting viscous boundary terms produces clear discrepancies in predicted shapes and speeds.
Where Pith is reading between the lines
- The identified optimum length ratio supplies a concrete design rule for engineering magnetically driven micro-swimmers.
- The same length-scale competition may control propulsion efficiency in other elastically deforming filaments actuated by external fields.
- The framework could be tested by measuring shape evolution at fixed EH length but varied magnetic-field amplitude.
Load-bearing premise
Resistive force theory plus Euler-Bernoulli beam theory with the stated boundary conditions remains quantitatively accurate for the realized filament shapes and speeds.
What would settle it
Swimming-speed measurements on filaments whose lengths are varied across the computed EH length, confirming or refuting a single maximum near that length scale.
Figures




read the original abstract
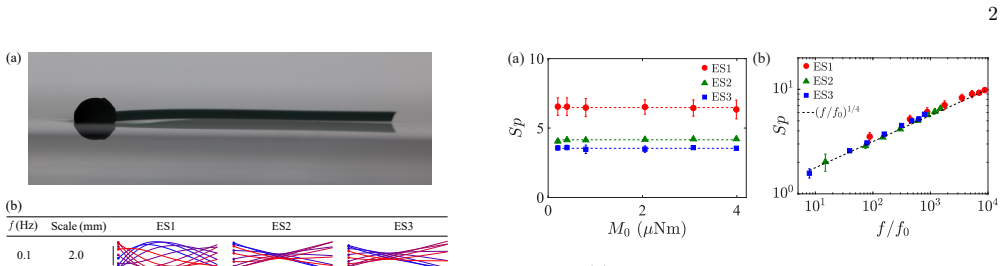
We investigate the low-Reynolds-number propulsion of a slender elastic filament with a dipolar magnetic head actuated by an oscillating field in a viscous fluid by studying its strokes and net forward motion. To capture these dynamics, we employ an elasto-hydrodynamic (EH) framework that couples Euler-Bernoulli beam mechanics with resistive force theory. Unlike prescribed-kinematics models, filament shapes here emerge self-consistently from the actuation and the force and torque boundary conditions (BCs). We demonstrate that viscous boundary contributions are crucial for quantitative agreement and show that the swimming dynamics are governed by the EH length and a magneto-viscous-elastic stroke amplitude introduced here. The swimming speed is non-monotonic with increasing ratio of the swimmer length to the EH length, and is shown to reach a maximum when the swimmer length is on the order of the EH length. We further discuss the analytical limit in which the tail BCs can be described as free, and the limitations that arise when viscous contributions to the BCs are ignored.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops an elasto-hydrodynamic model coupling Euler-Bernoulli beam theory to resistive force theory for a magnetically actuated elastic filament with a dipolar head. Filament shapes and net propulsion emerge self-consistently from the oscillating magnetic torque and the stated force/torque boundary conditions. The authors introduce the EH length and a magneto-viscous-elastic stroke amplitude as governing scales, demonstrate that viscous contributions to the boundary conditions are required for quantitative agreement with experiment, and report that forward speed is non-monotonic in the ratio of filament length L to EH length, attaining a maximum when L is comparable to the EH length.
Significance. If the RFT+EB model with the chosen boundary conditions is quantitatively reliable in the L ~ EH-length regime, the work supplies a useful design principle for magnetically driven microswimmers by identifying an optimal length scale set by the balance of elastic, viscous, and magnetic torques. The self-consistent treatment of shape (rather than prescribed kinematics) and the explicit introduction of the stroke-amplitude parameter are conceptual strengths. However, the absence of any reported discrepancy metric when viscous boundary terms are omitted, and the lack of comparison against slender-body theory or experimental shape data, limits the immediate impact.
major comments (2)
- [Abstract, §3] Abstract and §3 (model formulation): the assertion that 'viscous boundary contributions are crucial for quantitative agreement' is load-bearing for the claim of model fidelity, yet no L2 shape error, speed discrepancy, or other quantitative metric is supplied when those terms are dropped. Without this comparison the non-monotonic speed result cannot be distinguished from a possible artifact of the local-drag approximation or the free/torque boundary conditions.
- [§5] §5 (results on speed vs. L/EH-length): the reported maximum at L ~ EH length is obtained from the coupled EB+RFT system with the specific head/tail BCs; no sensitivity test to alternative boundary conditions (e.g., clamped or different torque balance) or to the resistive-force coefficients is presented. If the BCs or RFT deviate systematically in this regime, both the non-monotonicity and the location of the optimum become model-dependent rather than robust predictions.
minor comments (2)
- [Abstract] Notation for the magneto-viscous-elastic stroke amplitude is introduced without an explicit equation number or definition in the abstract; a numbered equation would improve clarity.
- [Figures] Figure captions should state the precise values of the dimensionless groups (EH length ratio, stroke amplitude) used for each curve so that the non-monotonic trend can be reproduced from the text alone.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which highlights opportunities to strengthen the quantitative support for our claims. We address each major comment below and will revise the manuscript to incorporate the suggested comparisons where feasible.
read point-by-point responses
-
Referee: [Abstract, §3] Abstract and §3 (model formulation): the assertion that 'viscous boundary contributions are crucial for quantitative agreement' is load-bearing for the claim of model fidelity, yet no L2 shape error, speed discrepancy, or other quantitative metric is supplied when those terms are dropped. Without this comparison the non-monotonic speed result cannot be distinguished from a possible artifact of the local-drag approximation or the free/torque boundary conditions.
Authors: We agree that a quantitative discrepancy metric is needed to substantiate the claim. In the revised manuscript we will add an L2-norm comparison of filament centerline shapes together with the relative difference in computed swimming speed between the full model (including viscous boundary contributions) and the version with those terms omitted. These metrics will be evaluated against the experimental data referenced in the paper to demonstrate the improvement. revision: yes
-
Referee: [§5] §5 (results on speed vs. L/EH-length): the reported maximum at L ~ EH length is obtained from the coupled EB+RFT system with the specific head/tail BCs; no sensitivity test to alternative boundary conditions (e.g., clamped or different torque balance) or to the resistive-force coefficients is presented. If the BCs or RFT deviate systematically in this regime, both the non-monotonicity and the location of the optimum become model-dependent rather than robust predictions.
Authors: The chosen boundary conditions are dictated by the physical setup (dipolar magnetic head with prescribed torque and free tail). We will expand the discussion in §5 to explain why clamped or alternative torque-balance conditions are inconsistent with the experimental configuration. We will also report a limited sensitivity check on the resistive-force coefficients within their accepted range for slender filaments; a full exploration of every conceivable BC variant lies outside the scope of the present study but can be noted as a direction for future work. revision: partial
Circularity Check
No significant circularity; central non-monotonicity is an emergent model output
full rationale
The paper's derivation proceeds from the coupled Euler-Bernoulli + resistive-force-theory equations with explicit head/tail boundary conditions; the EH length and magneto-viscous-elastic stroke amplitude are defined from the physical parameters (bending modulus, viscosity, magnetic moment, frequency) and then used to nondimensionalize the governing PDE. The reported non-monotonic dependence of speed on L/EH and the location of its maximum are obtained by solving that system (numerically or in the free-tail analytic limit). No step reduces the target result to a fitted parameter, a self-citation, or a redefinition of the input; the viscous-boundary term is an added modeling choice whose quantitative necessity is asserted but not itself the source of the speed curve. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (2)
- EH length
- magneto-viscous-elastic stroke amplitude
axioms (2)
- domain assumption Euler-Bernoulli beam equation governs filament bending
- domain assumption Resistive force theory supplies local drag coefficients
invented entities (1)
-
magneto-viscous-elastic stroke amplitude
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Gray, The movement of sea-urchin spermatozoa, J
J. Gray, The movement of sea-urchin spermatozoa, J. Exp. Biol.32, 775 (1955)
work page 1955
-
[2]
S. J. Lighthill,Mathematical biofluiddynamics(SIAM, 1975)
work page 1975
-
[3]
C. H. Wiggins, D. Riveline, and R. E. Goldstein, Trap- ping and wiggling: elastohydrodynamics of driven micro- filaments, Biophys. J.74, 1043 (1998)
work page 1998
-
[4]
C. H. Wiggins and R. E. Goldstein, Flexive and propul- sive dynamics of elastica at low Reynolds number, Phys. Rev. Lett.80, 3879 (1998)
work page 1998
-
[5]
J. Gray and G. J. Hancock, The propulsion of sea-urchin spermatozoa, J. Exp. Biol.32, 802 (1955)
work page 1955
-
[6]
R. E. Johnson, An improved slender-body theory for Stokes flow, J. Fluid Mech.99, 411 (1980)
work page 1980
-
[7]
E. Lauga and T. R. Powers, The hydrodynamics of swimming microorganisms, Rep. Prog. Phys.72, 096601 (2009)
work page 2009
-
[8]
Lauga,The fluid dynamics of cell motility, Vol
E. Lauga,The fluid dynamics of cell motility, Vol. 62 (Cambridge University Press, 2020)
work page 2020
-
[9]
O. S. Pak, W. Gao, J. Wang, and E. Lauga, High-speed propulsion of flexible nanowire motors: Theory and ex- periments, Soft Matter7, 8169 (2011)
work page 2011
-
[10]
T. S. Yu, E. Lauga, and A. Hosoi, Experimental investi- gations of elastic tail propulsion at low Reynolds number, Phys. Fluids18(2006)
work page 2006
-
[11]
B. Rodenborn, C.-H. Chen, H. L. Swinney, B. Liu, and H. Zhang, Propulsion of microorganisms by a helical flag- ellum, Proc. Natl. Acad. Sci. U.S.A.110, E338 (2013)
work page 2013
-
[12]
B. Liu, L. Chen, and J. Zhang, Effective and efficient modeling of the hydrodynamics for bacterial flagella, Phys. Fluids37(2025)
work page 2025
-
[13]
P. H. Htet and E. Lauga, Load-dependent resistive-force theory for helical filaments, Philos. Trans. R. Soc. A383 (2025)
work page 2025
-
[14]
M. Dasgupta, B. Liu, H. C. Fu, M. Berhanu, K. S. Breuer, T. R. Powers, and A. Kudrolli, Speed of a swimming sheet in Newtonian and viscoelastic fluids, Phys. Rev. E 87, 013015 (2013)
work page 2013
-
[15]
R. E. Johnson and C. J. Brokaw, Flagellar hydrody- namics. a comparison between resistive-force theory and slender-body theory, Biophys. J.25, 113 (1979)
work page 1979
-
[16]
B. M. Friedrich, I. H. Riedel-Kruse, J. Howard, and F. J¨ ulicher, High-precision tracking of sperm swimming trajectories with nanometer scale resolution, J. Exp. Biol. 213, 1226 (2010)
work page 2010
-
[17]
V. Kantsler and R. E. Goldstein, Fluctuations, dynam- ics, and the solitary wave of a swimming microorganism, Phys. Rev. Lett.108, 038103 (2012)
work page 2012
-
[18]
E. E. Keaveny, S. W. Walker, and M. J. Shelley, Opti- mization of chiral structures for microscale propulsion, Nano Lett.13, 531 (2013)
work page 2013
-
[19]
S. Ramananarivo, R. Godoy-Diana, and B. Thiria, Pas- sive elastic mechanism to mimic fish-muscle action in an- guilliform swimming, J. R. Soc. Interface10(2013)
work page 2013
- [20]
-
[21]
See Supplemental Material at URL-will-be-inserted-by-publisherfor charac- terization data, drag coefficients, analytical solution to EH model with Minimal BC, EH model shape comparisons, RFT propulsion calculations, and the list of videos
-
[22]
K. Yang, C. Lu, X. Zhao, and R. Kawamura, From bead to rod: Comparison of theories by measuring transla- tional drag coefficients of micron-sized magnetic bead- chains in Stokes flow, PLoS One12, 1 (2017)
work page 2017
-
[23]
Lauga, Floppy swimming: Viscous locomotion of ac- tuated elastica, Phys
E. Lauga, Floppy swimming: Viscous locomotion of ac- tuated elastica, Phys. Rev. E75, 041916 (2007)
work page 2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.