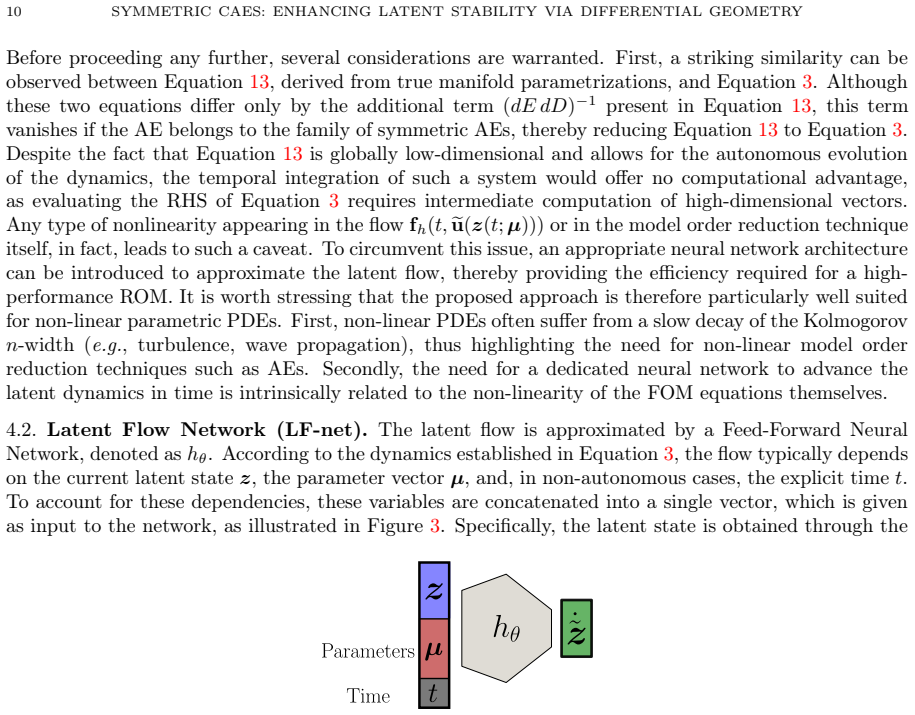
Convolutional Symmetric AutoEncoders: enhancing latent stability via differential geometry
Pith reviewed 2026-07-02 07:59 UTC · model grok-4.3
The pith
Symmetric convolutional autoencoders preserve manifold parametrization to deliver more accurate latent trajectories in reduced-order PDE models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors claim that a novel class of symmetric Convolutional AutoEncoders, by embodying the primary properties of manifold parametrization mappings, when integrated into a ROM framework, demonstrates significantly improved predictive capabilities, with numerical results on three one-dimensional PDE test cases showing consistently more accurate latent trajectories, lower reconstruction errors, and enhanced model robustness.
What carries the argument
The symmetric Convolutional AutoEncoder architecture that extends representation consistency from fully connected layers to convolutional layers to preserve essential manifold parametrization properties.
If this is right
- ROMs using symmetric CAEs achieve higher accuracy in latent space predictions for parametric PDEs.
- The symmetric design leads to lower reconstruction errors compared to standard CAEs.
- Model robustness is enhanced through the symmetric approach across the tested equations.
Where Pith is reading between the lines
- The method could extend to multi-dimensional problems or other network architectures for broader applicability in scientific computing.
- Integration with other ROM techniques might further stabilize predictions for slowly decaying Kolmogorov n-width problems.
Load-bearing premise
Extending representation consistency from fully connected to convolutional layers will automatically preserve the essential manifold parametrization properties required for stable and accurate ROMs.
What would settle it
Numerical experiments on the same test cases where the symmetric CAE does not show lower reconstruction errors or more accurate latent trajectories than the classical CAE.
Figures
















read the original abstract
Autoencoders (AEs) have emerged as powerful tools for non-linear dimensionality reduction, often surpassing traditional linear methods such as Proper Orthogonal Decomposition (POD) in scenarios characterized by slowly decaying Kolmogorov $n$-widths. In the realm of Reduced-Order Modelling (ROM), these models are increasingly utilized to learn low-dimensional representations of solution manifolds associated with parametric Partial Differential Equations (PDEs). However, the high expressivity of AEs presents a challenge: although trained networks typically minimize reconstruction error, they often struggle to capture the essential properties necessary for building accurate and robust ROMs. Recent works by arXiv:2307.15288v2 and arXiv:2506.11641v1 have tackled this challenge in fully connected AEs by proposing representation-consistent architectures, which preserve some of the properties belonging to POD. This study builds upon that concept by extending representation consistency for convolutional layers. We introduce a novel class of symmetric Convolutional AutoEncoders (CAEs) designed to embody the primary properties of manifold parametrization mappings. When integrated into a ROM framework, this architecture demonstrates significantly improved predictive capabilities. Specifically, we compared the performance of the ROMs based on classical and symmetric CAEs on three one dimensional academic test cases, namely the Linear Advection, the Viscous Burger and the Kuramoto Sivashinsky equation. Numerical results demonstrate that our proposed symmetric approach consistently yields more accurate latent trajectories, lower reconstruction errors, and enhanced model robustness.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes symmetric Convolutional AutoEncoders (CAEs) that extend representation consistency from fully connected layers (as in prior self-cited works) to convolutional layers, with the aim of preserving primary properties of manifold parametrization mappings for use in Reduced-Order Modeling (ROM) of parametric PDEs. It evaluates the approach against classical CAEs on three 1D test cases (Linear Advection, Viscous Burgers, Kuramoto-Sivashinsky), claiming more accurate latent trajectories, lower reconstruction errors, and improved robustness.
Significance. If the convolutional symmetry is shown to preserve the required manifold parametrization properties and the performance gains are reproducible with proper controls, the work could strengthen nonlinear ROM techniques for problems where POD fails due to slowly decaying Kolmogorov n-widths. The differential-geometry motivation for latent stability is a coherent direction, but the absence of explicit verification for the convolutional case limits the current impact.
major comments (2)
- [Abstract] Abstract (architecture design paragraph): the central claim that the symmetric CAE 'embodies the primary properties of manifold parametrization mappings' for convolutional layers is not supported by any derivation, invariance check, or comparison showing that the convolutional symmetry satisfies the same consistency conditions with POD-like mappings as the fully connected case in the cited priors (arXiv:2307.15288v2, arXiv:2506.11641v1). Without this step the reported ROM gains cannot be attributed to the claimed geometric preservation.
- [Numerical results] Numerical results (comparison on three test cases): the abstract asserts that the symmetric approach 'consistently yields more accurate latent trajectories, lower reconstruction errors, and enhanced model robustness,' yet supplies no quantitative tables, error metrics, error bars, training details, or ablation studies. This prevents verification of the empirical claim and leaves open the possibility that gains arise from unstated architectural differences rather than the symmetry.
minor comments (1)
- [Abstract] The abstract references three specific 1D PDE test cases but does not indicate whether the reported improvements hold under variations in network depth, filter sizes, or training hyperparameters.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our contributions. We address each major comment below and indicate the corresponding revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract (architecture design paragraph): the central claim that the symmetric CAE 'embodies the primary properties of manifold parametrization mappings' for convolutional layers is not supported by any derivation, invariance check, or comparison showing that the convolutional symmetry satisfies the same consistency conditions with POD-like mappings as the fully connected case in the cited priors (arXiv:2307.15288v2, arXiv:2506.11641v1). Without this step the reported ROM gains cannot be attributed to the claimed geometric preservation.
Authors: We agree that an explicit derivation and verification step for the convolutional extension would strengthen the link to the manifold parametrization properties established in the fully connected priors. The symmetric convolutional architecture is defined by enforcing weight symmetry across the encoder-decoder pair in a manner that mirrors the representation-consistency construction used for dense layers, thereby inheriting the same invariance under reparametrization. In the revised manuscript we will add a dedicated subsection that derives the consistency conditions for the convolutional case, includes an invariance check with respect to POD-like mappings, and provides a direct comparison to the cited works. revision: yes
-
Referee: [Numerical results] Numerical results (comparison on three test cases): the abstract asserts that the symmetric approach 'consistently yields more accurate latent trajectories, lower reconstruction errors, and enhanced model robustness,' yet supplies no quantitative tables, error metrics, error bars, training details, or ablation studies. This prevents verification of the empirical claim and leaves open the possibility that gains arise from unstated architectural differences rather than the symmetry.
Authors: The manuscript presents comparative results on the three test cases through figures, but we acknowledge that tabulated quantitative metrics, error bars, training details, and ablation studies are not provided. In the revision we will add tables reporting reconstruction and latent-trajectory errors (with standard deviations over multiple random seeds), full hyperparameter specifications, and ablation experiments that isolate the effect of the symmetry constraint while keeping all other architectural choices identical. revision: yes
Circularity Check
Representation consistency for CAEs justified primarily via self-citation to prior fully-connected AE works
specific steps
-
self citation load bearing
[Abstract]
"Recent works by arXiv:2307.15288v2 and arXiv:2506.11641v1 have tackled this challenge in fully connected AEs by proposing representation-consistent architectures, which preserve some of the properties belonging to POD. This study builds upon that concept by extending representation consistency for convolutional layers. We introduce a novel class of symmetric Convolutional AutoEncoders (CAEs) designed to embody the primary properties of manifold parametrization mappings."
The assertion that the new CAE class embodies the required manifold parametrization properties is justified solely by building upon the two self-cited prior works; the abstract provides no separate derivation or verification that the convolutional symmetry satisfies the same consistency conditions shown for fully-connected layers in those citations.
full rationale
The paper's core architectural claim—that the proposed symmetric CAEs 'embody the primary properties of manifold parametrization mappings'—is introduced by direct reference to two prior arXiv preprints on fully-connected representation-consistent AEs. No independent derivation, invariance proof, or explicit check that convolutional symmetry inherits the same POD-like properties appears in the provided abstract or skeptic summary. Numerical gains on the three PDE cases are presented as validation, but the load-bearing geometric premise reduces to the cited prior results. This qualifies as moderate self-citation load-bearing without reducing the entire result to a fit or tautology, hence score 4 rather than 0 or 6+.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Arbes, C
F. Arbes, C. Greif, and K. Urban. The kolmogorov n-width for linear transport: exact representation and the influence of the data.Advances in Computational Mathematics, 51(2):13, 2025
2025
-
[2]
Babin, Anatoli and M
V. Babin, Anatoli and M. I. Vishik.Attractors of evolution equations, volume 25. Elsevier, 1992
1992
-
[3]
J. C. Baez, S. Huntsman, and C. Weis. The kuramoto-sivashinsky equation, 2022
2022
-
[4]
SYMMETRIC CAES: ENHANCING LATENT STABILITY VIA DIFFERENTIAL GEOMETRY 23
S.Barwey, V.Shankar, V.Viswanathan, andR.Maulik.Multiscalegraphneuralnetworkautoencodersforinterpretable scientific machine learning.Journal of Computational Physics, 495:112537, 2023. SYMMETRIC CAES: ENHANCING LATENT STABILITY VIA DIFFERENTIAL GEOMETRY 23
2023
-
[5]
Benettin, L
G. Benettin, L. Galgani, A. Giorgilli, and J.-M. Strelcyn. Lyapunov characteristic exponents for smooth dynamical systems and for hamiltonian systems; a method for computing all of them. part 1: Theory.Meccanica, 15(1):9–20, 1980
1980
-
[6]
S. Brivio and N. R. Franco. Deep symmetric autoencoders from the eckart-young-schmidt perspective.arXiv preprint arXiv:2506.11641, 2025
-
[7]
S. L. Brunton and J. N. Kutz.Data-driven science and engineering: Machine learning, dynamical systems, and control. Cambridge University Press, 2022
2022
-
[8]
R. T. Chen, Y. Rubanova, J. Bettencourt, and D. K. Duvenaud. Neural ordinary differential equations.Advances in neural information processing systems, 31, 2018
2018
-
[9]
V. V. Chepyzhov and M. I. Vishik.Attractors for equations of mathematical physics, volume 49. American Mathe- matical Soc., 2002
2002
-
[10]
Colanera and L
A. Colanera and L. Magri. Quantized local reduced-order modeling in time (ql-rom).Computer Methods in Applied Mechanics and Engineering, 447:118393, 2025
2025
- [11]
-
[12]
R. A. Edson, J. E. Bunder, T. W. Mattner, and A. J. Roberts. Lyapunov exponents of the kuramoto–sivashinsky pde. The ANZIAM Journal, 61(3):270–285, 2019
2019
-
[13]
Farenga, S
N. Farenga, S. Fresca, S. Brivio, and A. Manzoni. On latent dynamics learning in nonlinear reduced order modeling. Neural Networks, 185:107146, 2025
2025
-
[14]
Floryan and M
D. Floryan and M. D. Graham. Data-driven discovery of intrinsic dynamics.Nature Machine Intelligence, 4(12):1113– 1120, 2022
2022
-
[15]
Foias, G
C. Foias, G. R. Sell, and R. Temam. Inertial manifolds for nonlinear evolutionary equations.Journal of differential equations, 73(2):309–353, 1988
1988
-
[16]
Fresca, L
S. Fresca, L. Dede’, and A. Manzoni. A comprehensive deep learning-based approach to reduced order modeling of nonlinear time-dependent parametrized pdes.Journal of Scientific Computing, 87(2):61, 2021
2021
-
[17]
Fresca, F
S. Fresca, F. Fatone, A. Manzoni, et al. Long-time prediction of nonlinear parametrized dynamical systems by deep learning-based reduced order models.Mathematics in Engineering, 5(6):1–36, 2023
2023
-
[18]
R. Frigg. In what sense is the kolmogorov-sinai entropy a measure for chaotic behaviour?—bridging the gap between dynamical systems theory and communication theory.The British journal for the philosophy of science, 55(3):411–434, 2004
2004
-
[19]
F. J. Gonzalez and M. Balajewicz. Deep convolutional recurrent autoencoders for learning low-dimensional feature dynamics of fluid systems.arXiv preprint arXiv:1808.01346, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[20]
Goodfellow
I. Goodfellow. Deep learning, 2016
2016
-
[21]
Gupta, P
P. Gupta, P. Schmid, D. Sipp, T. Sayadi, and G. Rigas. Mori–zwanzig latent space koopman closure for nonlinear autoencoder.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 481(2313), 2025
2025
-
[22]
A. J. Hey. High performance computing-past, present and future.Computing and Control Engineering, 8(1):33–42, 1997
1997
-
[23]
Huntsman, J
S. Huntsman, J. C. Baez, and C. Weis. Towards a rigorous particle interpretation for the kuramoto-sivashinsky equation. In2023 Joint Mathematics Meetings (JMM 2023). AMS, 2022
2023
-
[24]
Kassam and L
A.-K. Kassam and L. N. Trefethen. Fourth-order time-stepping for stiff pdes.SIAM Journal on Scientific Computing, 26(4):1214–1233, 2005
2005
-
[25]
D. P. Kingma and M. Welling. Auto-encoding variational bayes.arXiv preprint arXiv:1312.6114, 2013
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[26]
J. M. Lee. Smooth manifolds. InIntroduction to smooth manifolds, pages 1–29. Springer, 2003
2003
-
[27]
Margazoglou and L
G. Margazoglou and L. Magri. Stability analysis of chaotic systems from data.Nonlinear Dynamics, 111(9):8799–8819, 2023
2023
-
[28]
Maulik, B
R. Maulik, B. Lusch, and P. Balaprakash. Reduced-order modeling of advection-dominated systems with recurrent neural networks and convolutional autoencoders.Physics of Fluids, 33(3), 2021
2021
-
[29]
Menier, S
E. Menier, S. Kaltenbach, M. Yagoubi, M. Schoenauer, and P. Koumoutsakos. Interpretable learning of effective dynamicsformultiscalesystems.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 481(2305), 2025
2025
-
[30]
A. T. Mohan, N. Lubbers, M. Chertkov, and D. Livescu. Embedding hard physical constraints in neural network coarse-graining of three-dimensional turbulence.Physical Review Fluids, 8(1):014604, 2023
2023
- [31]
-
[32]
V. I. Oseledec. A multiplicative ergodic theorem, lyapunov characteristic numbers for dynamical systems.Transactions of the Moscow Mathematical Society, 19:197–231, 1968
1968
-
[33]
S. E. Otto, G. R. Macchio, and C. W. Rowley. Learning nonlinear projections for reduced-order modeling of dynamical systems using constrained autoencoders.Chaos: An Interdisciplinary Journal of Nonlinear Science, 33(11), 2023
2023
-
[34]
Özalp and L
E. Özalp and L. Magri. Stability analysis of chaotic systems in latent spaces.Nonlinear Dynamics, 113(11):13791– 13806, 2025
2025
-
[35]
Paszke, S
A. Paszke, S. Gross, S. Chintala, G. Chanan, E. Yang, Z. DeVito, Z. Lin, A. Desmaison, L. Antiga, and A. Lerer. Automatic differentiation in pytorch. InNIPS-W, 2017
2017
-
[36]
Pathak, B
J. Pathak, B. Hunt, M. Girvan, Z. Lu, and E. Ott. Model-free prediction of large spatiotemporally chaotic systems from data: A reservoir computing approach.Physical review letters, 120(2):024102, 2018
2018
-
[37]
Pathak, Z
J. Pathak, Z. Lu, B. R. Hunt, M. Girvan, and E. Ott. Using machine learning to replicate chaotic attractors and calculate lyapunov exponents from data.Chaos: An Interdisciplinary Journal of Nonlinear Science, 27(12), 2017
2017
-
[38]
Pathak, A
J. Pathak, A. Wikner, R. Fussell, S. Chandra, B. R. Hunt, M. Girvan, and E. Ott. Hybrid forecasting of chaotic processes: Using machine learning in conjunction with a knowledge-based model.Chaos: An interdisciplinary journal of nonlinear science, 28(4), 2018. 24 SYMMETRIC CAES: ENHANCING LATENT STABILITY VIA DIFFERENTIAL GEOMETRY
2018
-
[39]
Peherstorfer
B. Peherstorfer. Breaking the kolmogorov barrier with nonlinear model reduction.Notices of the American Mathe- matical Society, 69(5):725–733, 2022
2022
-
[40]
Pichi, B
F. Pichi, B. Moya, and J. S. Hesthaven. A graph convolutional autoencoder approach to model order reduction for parametrized pdes.Journal of Computational Physics, 501:112762, 2024
2024
-
[41]
Pikovsky and A
A. Pikovsky and A. Politi.Lyapunov exponents: a tool to explore complex dynamics. Cambridge University Press, 2016
2016
-
[42]
S. B. Pope. Turbulent flows.Measurement Science and Technology, 12(11):2020–2021, 2001
2020
-
[43]
Quarteroni, G
A. Quarteroni, G. Rozza, et al.Reduced order methods for modeling and computational reduction, volume 9. Springer, 2014
2014
-
[44]
Racca, N
A. Racca, N. A. K. Doan, and L. Magri. Predicting turbulent dynamics with the convolutional autoencoder echo state network.Journal of Fluid Mechanics, 975:A2, 2023
2023
-
[45]
R. K. Raj, C. J. Romanowski, J. Impagliazzo, S. G. Aly, B. A. Becker, J. Chen, S. Ghafoor, N. Giacaman, S. I. Gordon, C. Izu, et al. High performance computing education: Current challenges and future directions. InProceedings of the Working Group Reports on Innovation and Technology in Computer Science Education, pages 51–74. 2020
2020
-
[46]
Rifai, P
S. Rifai, P. Vincent, X. Muller, X. Glorot, and Y. Bengio. Contractive auto-encoders: Explicit invariance during feature extraction. InProceedings of the 28th international conference on international conference on machine learning, pages 833–840, 2011
2011
-
[47]
Romor, G
F. Romor, G. Stabile, and G. Rozza. Non-linear manifold reduced-order models with convolutional autoencoders and reduced over-collocation method.Journal of Scientific Computing, 94(3):74, 2023
2023
-
[48]
Sagaut.Large eddy simulation for incompressible flows: an introduction
P. Sagaut.Large eddy simulation for incompressible flows: an introduction. Springer, 2006
2006
-
[49]
P. J. Schmid. Dynamic mode decomposition of numerical and experimental data.Journal of fluid mechanics, 656:5–28, 2010
2010
-
[50]
C. Skokos. The lyapunov characteristic exponents and their computation. InDynamics of small solar system bodies and exoplanets, pages 63–135. Springer, 2009
2009
-
[51]
Solera-Rico, C
A. Solera-Rico, C. Sanmiguel Vila, M. Gómez-López, Y. Wang, A. Almashjary, S. T. Dawson, and R. Vinuesa. β-variational autoencoders and transformers for reduced-order modelling of fluid flows.Nature Communications, 15(1):1361, 2024
2024
-
[52]
R. Temam. Inertial manifolds.The Mathematical Intelligencer, 12(4):68–74, 1990
1990
-
[53]
Temam.Infinite-dimensional dynamical systems in mechanics and physics
R. Temam.Infinite-dimensional dynamical systems in mechanics and physics. Springer Science & Business Media, 2012
2012
-
[54]
Tonioni, L
N. Tonioni, L. Agostini, F. Kerhervé, L. Cordier, and R. Vinuesa. Vivaldy: A hybrid generative reduced-order model for turbulent flows, applied to vortex-induced vibrations.Physical Review Fluids, 11(4):044902, 2026
2026
-
[55]
Vincent, H
P. Vincent, H. Larochelle, Y. Bengio, and P.-A. Manzagol. Extracting and composing robust features with denoising autoencoders. InProceedings of the 25th international conference on Machine learning, pages 1096–1103, 2008
2008
-
[56]
P. R. Vlachas, W. Byeon, Z. Y. Wan, T. P. Sapsis, and P. Koumoutsakos. Data-driven forecasting of high-dimensional chaotic systems with long short-term memory networks.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 474(2213), 2018
2018
-
[57]
Vlachas, J
P.-R. Vlachas, J. Pathak, B. R. Hunt, T. P. Sapsis, M. Girvan, E. Ott, and P. Koumoutsakos. Backpropagation algo- rithms and reservoir computing in recurrent neural networks for the forecasting of complex spatiotemporal dynamics. Neural Networks, 126:191–217, 2020
2020
-
[58]
Weiler, P
M. Weiler, P. Forré, E. Verlinde, and M. Welling.Equivariant and Coordinate Independent Convolutional Networks. 2023
2023
-
[59]
P. J. Werbos. Backpropagation through time: what it does and how to do it.Proceedings of the IEEE, 78(10):1550– 1560, 2002
2002
-
[60]
Whiteley, A
N. Whiteley, A. Gray, and P. Rubin-Delanchy. Statistical exploration of the manifold hypothesis, 2025
2025
-
[61]
D. C. Wilcox et al.Turbulence modeling for CFD, volume 2. DCW industries La Canada, CA, 1998
1998
-
[62]
S. Zelik. Inertial manifolds and finite-dimensional reduction for dissipative pdes.Proceedings of the Royal Society of Edinburgh Section A: Mathematics, 144(6):1245–1327, 2014
2014
-
[63]
Zighed, N
I. Zighed, N. Thome, P. Gallinari, and T. Sayadi. Uncertainty-aware and parametrized dynamic reduced-order model: Application to unsteady flows.Physical Review Fluids, 10(11):114902, 2025. AppendixA.Chaotic systems A.1.Lyapunov Exponents (LEs) and related quantities.Letu(t,µ)be the solution of the au- tonomous dynamical system ˙u(t,µ) =f(u(t,µ)),u(t,µ) = ...
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.